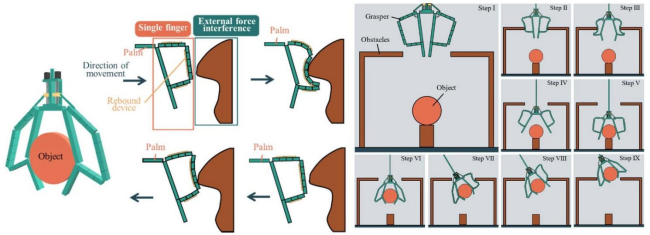
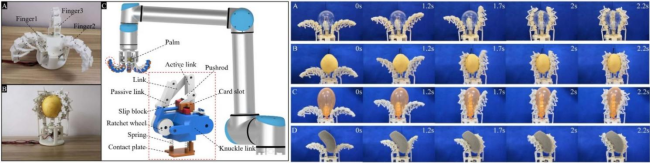
ບໍ່ດົນມານີ້, ສາດສະດາຈານ Wang Rugui ແລະທີມງານຄົ້ນຄວ້າຂອງລາວຈາກໂຮງຮຽນວິສະວະກໍາກົນຈັກ (GXU) ໄດ້ພັດທະນາການອອກແບບທີ່ສາມາດປັບຕົວໄດ້ສູງສໍາລັບຫຸ່ນຍົນທີ່ມີຄວາມຍືດຫຍຸ່ນໂດຍອີງໃສ່ຫຼັກການຂອງ origami ກະດານຫນາ. ການອອກແບບນະວັດຕະກໍານີ້ປະສົມປະສານປະສິດທິພາບການຈັບທີ່ຫມັ້ນຄົງຂອງ graspers ອົງປະກອບ rigid ກັບຄວາມສາມາດຕ້ານການແຊກແຊງຂອງ graspers ອົງປະກອບທີ່ມີຄວາມຍືດຫຍຸ່ນ, ສະຫນອງວິທີການໃຫມ່ສໍາລັບການຫມູນໃຊ້ວັດຖຸທີ່ຫມັ້ນຄົງໃນສະພາບແວດລ້ອມການໂຕ້ຕອບສະລັບສັບຊ້ອນ.
ເອກະສານການຄົ້ນຄວ້າ, ຫົວຂໍ້ "ການອອກແບບຂອງກະດານຫນາ Origami-inspired Grasper Flexible ທີ່ມີຄວາມສາມາດໃນການຕ້ານການແຊກແຊງ" ໄດ້ຖືກຈັດພີມມາຢູ່ໃນວາລະສານທີ່ມີຊື່ສຽງຂອງກົນໄກແລະທິດສະດີເຄື່ອງຈັກ, ເຊິ່ງເປັນວາລະສານ TOP-tier ໃນປະເພດ "Q1" ຂອງບົດລາຍງານການອ້າງອິງວາລະສານ. ຍິ່ງໄປກວ່ານັ້ນ, ວາລະສານສະບັບນີ້ແມ່ນຂຶ້ນກັບສະຫະພັນສາກົນສໍາລັບການສົ່ງເສີມກົນໄກແລະວິທະຍາສາດເຄື່ອງຈັກ (IFToMM). ການຄົ້ນຄວ້າໄດ້ຖືກດໍາເນີນການສະເພາະຢູ່ GXU, ໂດຍມີອາຈານ Wang Rugui ເປັນຜູ້ຂຽນທໍາອິດແລະຜູ້ຂຽນທີ່ສອດຄ້ອງກັນ. ການຕັ້ງຄ່າ grasper ສ້າງຂຶ້ນໂດຍທີມງານຄົ້ນຄ້ວາໄດ້ຮັບການປະເມີນຢ່າງລະມັດລະວັງໂດຍຜູ້ຊ່ຽວຊານແລະບັນນາທິການຈາກກົນໄກແລະທິດສະດີເຄື່ອງຈັກແລະໄດ້ຖືກກໍານົດຢ່າງເປັນທາງການເປັນ "GXU-F-Grasper" (ຫຍໍ້ມາຈາກ Guangxi University Flexible Grasper).
GXU-F-Grasper
GXU- Grasper
ໃນສະພາບການຂອງ "ແຜນການ 5 ປີຄັ້ງທີ 14 ຂອງຈີນເພື່ອພັດທະນາອຸດສາຫະກຳຫຸ່ນຍົນ" (ລະບຽບການຮ່ວມຂອງກະຊວງອຸດສາຫະກຳ ແລະ ເຕັກໂນໂລຊີຂໍ້ມູນຂ່າວສານ (MIIT) ແມ່ນເອກະສານຮ່ວມມືທີ່ອອກໂດຍ 15 ກົມການ, ລວມທັງ MIIT, ຄະນະກຳມະການພັດທະນາແລະ ປະຕິຮູບແຫ່ງຊາດ ແລະ ກະຊວງວິທະຍາສາດ ແລະ ເຕັກໂນໂລຢີ), ການຈັບມືຫຸ່ນຍົນ,ເປັນວຽກງານທີ່ສຳຄັນໃນການຄົ້ນຄວ້າ. ໃນຊຸມປີມໍ່ໆມານີ້, ສາດສະດາຈານ Wang Rugui ໄດ້ນໍາພາທີມງານຄົ້ນຄວ້າກົນໄກທີ່ກ້າວຫນ້າແລະອຸປະກອນຫຸ່ນຍົນ, ອຸທິດຄວາມພະຍາຍາມຂອງພວກເຂົາໃນການອອກແບບແລະການວິເຄາະປະສິດທິພາບຂອງຫຸ່ນຍົນ end effectors. ວຽກງານທີ່ຫນ້າຊົມເຊີຍຂອງພວກເຂົາໄດ້ຖືກຈັດພີມມາຢູ່ໃນວາລະສານທີ່ມີຊື່ສຽງທັງພາຍໃນແລະຕ່າງປະເທດ, ລວມທັງວາລະສານວິສະວະກໍາກົນຈັກ, ກົນໄກແລະທິດສະດີເຄື່ອງຈັກ, ວາລະສານຂອງກົນໄກແລະຫຸ່ນຍົນ - ທຸລະກໍາຂອງ ASME, ແລະວາລະສານການອອກແບບກົນຈັກ - ທຸລະກໍາຂອງ ASME, ການຜະລິດຊຸດຂອງເອກະສານທາງວິຊາການທີ່ມີຄຸນນະພາບສູງ.
ໂດຍສະເພາະແມ່ນ, ຜົນສໍາເລັດການຄົ້ນຄວ້າຂອງທີມງານຂອງອາຈານ Wang Rugui ໄດ້ຖືກຕັ້ງຊື່ຕາມ GXU ໃນຂົງເຂດວິສະວະກໍາກົນຈັກ. ໃນເດືອນມັງກອນ 2023, ເອກະສານທາງວິຊາການທີ່ມີຫົວຂໍ້ວ່າ "ການວິເຄາະການປັບຕົວດ້ວຍຕົນເອງຂອງການຈໍາລອງ 'ອ່ອນ' ກົນຈັກທີ່ສາມາດລັອກຕົນເອງໄດ້" ໄດ້ຖືກຈັດພີມມາຢູ່ໃນວາລະສານຂອງສະມາຄົມວິສະວະກອນກົນຈັກອາເມລິກາ (ASME). ການອອກແບບ grasper ທີ່ມີນະວັດກໍາ, emulating ເປັນ "ອ່ອນ" ການຈັບແຫນ້ນແຫນ້ນປັບ, ໄດ້ຖືກຕັ້ງຊື່ທີ່ເຫມາະສົມ "GXU Grasper" ໂດຍວາລະສານທີ່ໂດດເດັ່ນ.
ຍິ່ງໄປກວ່ານັ້ນ, ມັນເປັນມູນຄ່າທີ່ຍອມຮັບວ່າໃນປະຫວັດສາດ, ໂຄງການອອກແບບ grasper ຕົວແທນໃນໂດເມນຂອງຫຸ່ນຍົນມັກຈະຖືກສະແດງດ້ວຍຊື່ທີ່ໄດ້ຮັບການດົນໃຈໂດຍບຸກຄົນຫຼືສະຖາບັນ, ເຊັ່ນ Stanford Grasper, Utah / MIT Grasper, DLR / HIT Grasper, ແລະອື່ນໆ.
 ການຄົ້ນຄວ້າ
>
Content
ການຄົ້ນຄວ້າ
>
Content
 Address: No.100,East Daxue Road,Xixiangtang District,Nanning, Guangxi,China
Address: No.100,East Daxue Road,Xixiangtang District,Nanning, Guangxi,China Postal Code: 530004
Postal Code: 530004 Tel: 86-771-3238863
Tel: 86-771-3238863 Email: gjc@gxu.edu.cn
Email: gjc@gxu.edu.cn